工业级高精度定位技术是现代工业智能化转型的核心支撑,其通过多源传感器融合、高精度时空基准解算及边缘智能计算,实现厘米级至毫米级的空间定位精度,广泛应用于智能制造、智慧交通、精准农业、无人系统等关键领域,与消费级定位技术不同,工业级场景对定位的稳定性、抗干扰性、实时性和可靠性提出了严苛要求,需在复杂电磁环境、多路径效应、动态遮挡等挑战下持续输出高可信度数据。

技术架构与核心组成
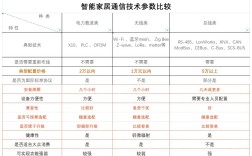
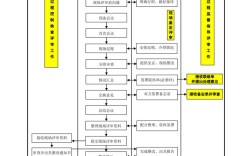
工业级高精度定位系统通常由“感知层-传输层-解算层-应用层”四层架构构成,感知层集成GNSS(全球导航卫星系统)接收机、惯性测量单元(IMU)、激光雷达(LiDAR)、视觉摄像头、超宽带(UWB)标签等多源传感器,通过异构数据采集弥补单一传感器的局限性,传输层依托5G、TSN(时间敏感网络)或工业以太网,实现低延迟、高可靠的数据回传,解算层是系统的“大脑”,通过卡尔曼滤波、联邦学习等算法融合多源数据,结合高精度地图与动态时空基准,解算出目标物体的三维坐标、姿态及运动状态,应用层则根据行业需求输出定位服务,如AGV(自动导引运输车)的路径规划、工程机械的毫米级调平、无人机电力巡检的航点跟踪等。
关键技术突破
-
多源融合定位技术:GNSS在开阔环境下可提供亚米级定位,但在室内、隧道或城市峡谷等区域易受信号遮挡,通过融合IMU的短时高精度惯性数据、UWB的超短基线测距(精度可达3-10cm)及视觉SLAM(同步定位与地图构建)的环境特征匹配,构建“天-空-地-内”一体化的全场景定位能力,在智能工厂中,AGV可通过GNSS+UWB组合定位实现厂区跨区域移动,进入车间后切换为视觉+IMU定位,确保无缝衔接。
-
高精度时空基准统一:工业场景对时间同步要求极为苛刻,纳秒级时间误差可导致米级定位偏差,通过部署GNSS/BD双模授时系统、IEEE 1588精密时间协议(PTP)及原子钟,建立统一的时间基准,结合连续运行参考站(CORS)网络与PPP-RTK(精密单点定位-实时动态差分)技术,将卫星定位误差控制在厘米级,为大规模设备协同提供时空基准。
-
边缘智能与动态抗干扰:针对工业现场的电磁干扰(如电机、变频器)和多路径效应(如金属反射面),边缘计算节点可实时分析信号特征,通过自适应滤波、深度学习干扰识别算法剔除异常数据,在港口集装箱码头,岸桥起重机定位系统需抵御大型金属设备的多路径干扰,通过部署边缘服务器实时解算GNSS原始观测值,确保吊具定位精度优于2cm。
 (图片来源网络,侵删)
(图片来源网络,侵删)
典型应用场景
| 应用领域 | 具体场景 | 技术要求 | 案例效果 |
|---|---|---|---|
| 智能制造 | AGV/AMR调度、产线精确定位 | 实时性<100ms,精度±1cm | 某汽车工厂AGV调度效率提升30%,故障率下降50% |
| 智慧交通 | 自动驾驶、车路协同 | 定位精度10cm,安全冗余 | L4级自动驾驶卡车在港口实现24小时无人运输 |
| 精准农业 | 农机自动驾驶、变量施肥 | 亚米级路径跟踪,毫米级作业 | 水稻种植减少农药使用量20%,提升亩产8% |
| 无人系统 | 无人机巡检、机器人巡检 | 动态姿态精度0.1°,定位精度5cm | 电力巡检无人机识别缺陷准确率达99.2% |
挑战与发展趋势
当前工业级高精度定位仍面临成本高、部署复杂、极端环境适应性不足等挑战,未来发展趋势包括:一是“定位-通信-计算”一体化融合,如6G网络原生支持高精度定位服务;二是数字孪生与定位技术结合,通过虚拟空间映射实现物理设备的厘米级孪生管理;三是AI驱动的自适应定位算法,通过强化学习动态优化传感器权重,提升在动态干扰场景下的鲁棒性。
相关问答FAQs
Q1:工业级高精度定位与消费级定位(如手机GPS)的核心区别是什么?
A1:工业级定位在精度(厘米级 vs 米级)、可靠性(99.999%可用性 vs 80%-90%)、抗干扰能力(复杂电磁环境适应性弱)及实时性(毫秒级延迟 vs 秒级更新)上远超消费级定位,工业系统需支持多设备协同、长时间稳定运行,并满足功能安全标准(如ISO 13849),而消费级定位更侧重成本与功耗优化。
Q2:在室内无GNSS信号的工厂环境中,如何实现高精度定位?
A2:室内主要依赖“伪卫星+UWB+视觉”融合方案,通过部署UWB基站形成定位锚点,结合视觉SLAM利用环境特征进行实时定位,同时以IMU辅助解决动态遮挡问题,部分场景还会引入地磁指纹或Wi-Fi RTT(往返时间)技术作为补充,通过多源数据融合确保定位连续性与精度,某电子工厂采用UWB+视觉方案,实现了30000㎡车间内AGV的±3cm定位精度。