汽车智能网联技术教材作为系统化传授该领域知识与技能的核心载体,其内容体系需融合传统汽车工程、通信技术、计算机科学、人工智能及大数据等多学科知识,兼顾理论深度与实践应用,当前主流教材通常以“基础认知—核心技术—系统架构—应用实践—安全伦理”为主线,逐步展开对智能网联汽车全产业链的解析。
基础认知与技术演进
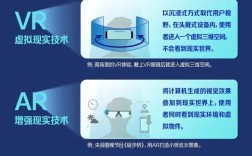
教材开篇多从智能网联汽车的定义与发展历程切入,明确其“智能化+网联化”的双重属性,智能化指通过传感器、控制器与执行器实现车辆自主感知、决策与控制;网联化则依托车用通信技术实现车与车(V2V)、车与路(V2I)、车与人(V2P)、车与云(V2X)的实时交互,通过对比传统汽车与智能网联汽车在动力系统、操控方式、人机交互等方面的差异,帮助学生建立技术变革的整体认知,教材会梳理国内外技术路线(如SAE自动驾驶分级标准、中国智能网联汽车发展战略),分析政策法规、市场需求对技术演进的影响,强调“车路云一体化”的发展趋势。
核心技术与系统架构
感知层技术
感知系统是智能网联汽车的“五官”,教材重点讲解多传感器融合方案:
- 传感器类型:包括摄像头(视觉识别)、激光雷达(LiDAR,三维环境建模)、毫米波雷达(测速测距,全天候工作)、超声波雷达(近距离泊车辅助)及惯性测量单元(IMU,姿态感知)等,通过表格对比其性能参数、适用场景及局限性。
- 融合算法:阐述数据级(像素级)、特征级与决策级融合原理,以卡尔曼滤波、深度学习(如YOLO目标检测、PointNet点云处理)为例,说明如何提升感知系统的鲁棒性与精度。
通信与定位技术
网联化依赖高可靠、低延迟的通信与精准定位:
- 车用通信:详解DSRC(专用短程通信)与C-V2X(蜂窝车联网,包括LTE-V2X和5G-V2X)的技术差异,对比其带宽、时延、连接数等关键指标,结合典型应用场景(如交叉路口碰撞预警、绿波通行)说明通信协议设计逻辑。
- 高精度定位:介绍GNSS(全球导航卫星系统)与惯性导航(INS)的组合定位方案,分析RTK(实时动态差分)技术如何实现厘米级定位,并阐述高精度地图(HD Map)的结构要素(如车道线、交通标志、三维点云)及其在定位中的作用。
决策与控制技术
决策与控制系统是智能网联汽车的“大脑”与“神经中枢”:
- 决策规划:讲解行为决策(如跟车、变道、超车)与路径规划(基于A*、RRT等算法的静态路径规划,结合DWA、LQR等动态避障算法),强调算法的实时性与安全性。
- 控制执行:分析纵向控制(如PID、自适应控制的车速跟驰)与横向控制(如基于模型预测控制MPC的轨迹跟踪),通过案例说明如何将决策指令转化为车辆的实际动作。
系统架构与平台
教材通常以分层架构解析整车系统:
- 架构层级:从感知层、决策层、执行层到底盘控制层、车身控制层,说明各层级的功能边界与数据交互逻辑;对比分布式架构与集中式架构(如域控制器、中央计算平台)的优劣,探讨“软件定义汽车”背景下架构的演进方向。
- 操作系统与中间件:介绍AUTOSAR(汽车开放系统架构)经典平台与自适应平台,分析ROS(机器人操作系统)在自动驾驶开发中的应用,阐述中间件如何实现硬件抽象与通信调度。
应用场景与实践案例
教材结合量产车型与前沿研究,展示技术的落地应用:
- L2-L3级辅助驾驶:以自适应巡航(ACC)、车道保持辅助(LKA)、自动紧急制动(AEB)为例,说明功能逻辑与传感器配置;解析特斯拉Autopilot、小鹏NGP等系统的差异化策略。
- 车路云协同应用:介绍智慧城市中的车路协同系统(如V2X红绿灯提醒、盲区预警),分析边缘计算节点如何实现本地数据处理与实时决策。
- 数据驱动开发:阐述数据采集(车载传感器、路侧设备)、标注(人工标注与自动标注工具)、训练(仿真测试与实车测试)的全流程,强调数据闭环对算法迭代的重要性。
安全与伦理挑战
作为智能网联技术的关键议题,安全与伦理贯穿教材始终:
- 功能安全(ISO 26262):讲解汽车安全完整性等级(ASIL)划分,说明从需求分析到系统验证的安全开发流程。
- 网络安全:分析车载网络(CAN、以太网)的漏洞风险,阐述加密技术(如国密SM2/SM4)、入侵检测系统(IDS)等防护手段。
- 伦理与法规:探讨自动驾驶场景下的责任界定(车主、制造商、算法开发者)、数据隐私保护(GDPR、中国《数据安全法》),以及伦理决策算法的设计困境(如“电车难题”)。
相关问答FAQs
Q1:智能网联汽车中的多传感器融合为何必要?单一传感器能否满足需求?
A1:多传感器融合是提升感知系统可靠性的核心手段,单一传感器存在固有局限性:摄像头易受光照、天气影响,激光雷达在雨雾中性能下降,毫米波雷达分辨率低且无法识别颜色类型,通过融合不同传感器的数据(如摄像头识别交通标志+激光雷达构建三维环境+毫米波雷达测速),可优势互补,实现全天候、全场景的精准感知,在夜间场景中,激光雷达与毫米波雷达可弥补摄像头视距不足的缺陷;而在隧道等无GNSS信号区域,结合IMU与视觉SLAM(同步定位与地图构建)可实现连续定位,单一传感器难以满足复杂交通环境的安全需求,融合技术已成为行业共识。
Q2:车用通信技术DSRC与C-V2X的主要区别是什么?未来谁更可能成为主流?
A2:DSRC(基于IEEE 802.11p)和C-V2X(基于3GPP标准)是车用通信的两大技术路线,核心区别如下:
| 对比维度 | DSRC | C-V2X |
|--------------------|-----------------------------------|-----------------------------------|
| 技术基础 | Wi-Fi衍生,专用频段(5.9GHz) | 蜂窝网络演进,复用现有移动频谱 |
| 通信范围 | 短距离(约300-1000米) | 中远距离(可达1-2公里,5G-V2X更优)|
| 移动性支持 | 低速场景优化 | 高速移动场景(如高速公路)性能优异 |
| 演进路径 | 技术成熟但演进停滞 | 持续迭代(LTE-V2X→5G-V2X) |
| 产业链生态 | 日美为主,国内布局较少 | 中国、欧美广泛支持,产业链成熟 |
未来C-V2X更可能成为主流:5G-V2X通过uRLLC(超可靠低延迟通信)和mMTC(海量物联网连接)特性,满足自动驾驶对时延(<10ms)和可靠性(>99.999%)的高要求;中国将C-V2X纳入新基建,推动路侧设备与车载终端规模化部署,形成“车-路-云”协同生态,而DSRC因技术迭代缓慢、频谱资源有限,市场份额逐渐萎缩。