MEMS-INS技术,即微机电系统惯性导航系统技术,是现代导航领域的一项重要突破,它将微机电传感器与惯性导航算法深度融合,为航空航天、国防军事、自动驾驶、消费电子等众多领域提供了高精度、小型化、低成本的导航解决方案,该技术的核心在于通过集成化的微机电传感器感知载体的运动状态,结合先进的算法实时解算出载体的位置、速度和姿态信息,实现完全自主的导航功能。

从技术原理来看,MEMS-INS主要由惯性测量单元(IMU)和导航解算算法两大部分组成,惯性测量单元是系统的“感官系统”,包含微机电陀螺仪和微机电加速度计,陀螺仪用于测量载体相对于惯性空间的角速度,即载体绕三个坐标轴的旋转速率;加速度计则用于测量载体在三个坐标轴上的线加速度,这些原始的传感器数据需要经过复杂的导航解算算法处理,才能转化为有意义的导航参数,导航解算通常基于牛顿力学和刚体运动学原理,通过积分角速度得到姿态角,积分加速度得到速度,再积分速度得到位置,由于MEMS传感器本身存在误差(如零偏、噪声、标度因子误差等),且这些误差会随时间累积,导致导航精度随时间发散,因此需要辅助信息进行误差补偿和修正。
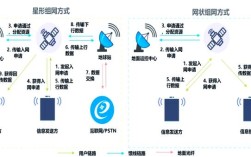
为了提高MEMS-INS的精度和可靠性,通常采用组合导航策略,常见的组合方式包括与全球导航卫星系统(GNSS)的组合、与里程计(ODO)的组合、以及与磁力计的组合等,GNSS/MEMS-INS组合导航是最为成熟和广泛应用的方案,GNSS可以提供高精度的位置和速度信息,但存在信号易受干扰、易被遮挡的问题(如在室内、隧道、城市峡谷等环境);而MEMS-INS完全自主,不受外界环境影响,但误差随时间累积,两者通过卡尔曼滤波等最优估计算法进行数据融合,取长补短:GNSS为INS提供长期稳定的绝对位置和速度参考,抑制INS误差的发散;INS则在GNSS信号失效时提供短时高精度的导航推算,保证导航的连续性,这种组合方式显著提升了系统在复杂环境下的导航精度和可靠性。
MEMS-INS技术的优势主要体现在以下几个方面:一是小型化与集成化,采用微纳加工技术制造,传感器尺寸可达到毫米甚至微米级别,整个IMU模块可以集成在单一芯片上,极大地减小了系统的体积和重量,便于在小型平台(如无人机、可穿戴设备)上应用;二是低成本,与传统机械式或光纤惯性导航系统相比,MEMS传感器采用批量生产,成本大幅降低,推动了惯性导航技术的普及应用;三是低功耗,MEMS传感器的工作功耗通常较低,适合对功耗敏感的移动设备和便携式系统;四是高可靠性,由于没有活动部件(或活动部件极少),MEMS传感器的抗冲击、抗振动能力较强,寿命更长。
尽管MEMS-INS技术具有诸多优势,但其性能仍受到MEMS传感器自身精度的限制,高端MEMS陀螺仪的零偏稳定性可达0.1°/h,中端为1-10°/h,低端则为10-100°/h或更高,与光纤陀螺仪(0.001°/h)和激光陀螺仪(0.0001°/h)相比仍有较大差距,在要求长时间高精度导航的应用场景(如战略导弹、精密测绘)中,MEMS-INS仍难以完全替代高性能惯性导航系统,MEMS传感器的温度特性、非线性误差、交叉耦合误差等也会影响系统精度,需要通过温度补偿、误差建模与标定等技术进行抑制。

随着微纳加工技术、先进算法(如人工智能、机器学习在误差补偿中的应用)以及多传感器融合技术的发展,MEMS-INS技术正在不断进步,MEMS传感器的精度和稳定性持续提升,逐步向战术级甚至导航级迈进;组合导航算法的优化使得MEMS-INS在复杂动态环境下的适应性更强,在自动驾驶领域,MEMS-INS与GNSS、轮速传感器、视觉传感器等多源信息融合,可实现车辆在隧道、地下车库等GNSS信号弱覆盖区域的高精度定位和姿态确定;在无人机领域,MEMS-INS为无人机提供稳定的姿态控制和自主导航能力,确保其在GPS信号丢失时的安全返航。
MEMS-INS技术将朝着更高精度、更低成本、更强集成度和更智能化的方向发展,随着5G、物联网、人工智能等新兴技术的兴起,MEMS-INS作为关键的核心传感器,将在智慧城市、智能交通、机器人、虚拟现实/增强现实等领域发挥更加重要的作用,成为万物互联时代不可或缺的感知与导航核心。
相关问答FAQs:
-
问:MEMS-INS与传统的GPS导航相比,有哪些优势和局限性?
答:优势方面,MEMS-INS完全自主工作,不受外界电磁信号干扰和遮挡(如室内、隧道、水下等环境),能提供高带宽的位置、速度和姿态信息,响应速度快;而GPS依赖卫星信号,易受干扰和遮挡,且更新率较低(通常为1-10Hz),局限性方面,MEMS-INS的误差随时间累积,长时间导航精度会下降,需要定期校正;而GPS能提供长期稳定的绝对位置精度,但无法直接提供姿态信息,且在信号不良时性能显著降低,两者常结合使用(如GPS/MEMS-INS组合导航),以弥补彼此的不足。 (图片来源网络,侵删)
(图片来源网络,侵删) -
问:影响MEMS-INS导航精度的主要因素有哪些?如何提高其精度?
答:主要因素包括:MEMS传感器本身的误差(如零偏不稳定性、随机游走、标度因子误差、非线性误差)、初始对准误差、安装误差、环境干扰(如温度变化、振动、冲击)以及导航算法的精度,提高精度的方法有:① 采用高精度MEMS传感器或传感器阵列;② 进行严格的误差建模与补偿(如温度补偿、静态标定、动态标定);③ 优化导航算法(如采用更先进的卡尔曼滤波器、引入人工智能算法进行误差预测与补偿);④ 实现多传感器组合导航(如与GNSS、里程计、磁力计、视觉传感器等融合),利用外部信息抑制误差累积;⑤ 改进系统设计与安装工艺,减小安装误差和环境影响。