budgee跟随技术作为近年来智能移动设备领域的重要创新,其核心在于通过多传感器融合与智能算法实现设备对用户的精准、稳定跟随,这项技术不仅解放了用户的双手,更在物流、旅游、摄影等多个场景展现出巨大应用潜力,其技术架构与实现逻辑值得深入剖析。
从技术原理来看,budgee跟随技术的基础是多层次感知系统的协同工作,环境感知模块通过多线激光雷达、深度摄像头和超声波传感器的组合构建三维环境模型,激光雷达以每秒10次以上的频率扫描周围环境,生成高精度点云数据,能够精准识别障碍物的距离、形状与位置;深度摄像头则通过ToF(飞行时间)或结构光技术获取场景深度信息,弥补激光雷达在近距离探测盲区的不足;超声波传感器作为辅助,在近距离复杂环境下提供冗余校验,确保感知数据的全面性,三种传感器数据通过卡尔曼滤波算法进行融合,有效消除单一传感器的误差干扰,使设备对环境的理解精度达到厘米级。
在用户定位层面,budgee采用了基于多特征融合的动态追踪算法,系统通过RGB摄像头实时捕捉用户的视觉特征,包括颜色、纹理轮廓等,结合红外传感器实现全天候目标识别,当用户在室内或弱光环境下时,内置的IMU(惯性测量单元)通过加速度计和陀螺仪数据,结合零速修正算法(ZUPT)持续追踪用户的移动轨迹,即使出现短暂视觉遮挡也能保持定位连续性,更关键的是,该技术引入了深度学习模型,通过大量真实场景数据训练的神经网络,能够区分用户与相似外观的移动物体(如其他行人),有效解决“目标混淆”问题,据测试数据显示,其在复杂人流环境下的目标识别准确率超过92%。
运动控制系统的实现体现了budgee跟随技术的工程精度,底层采用基于模型预测控制(MPC)的动态路径规划算法,系统以20ms的高频周期更新控制指令,实时调整差速轮的转速与转向角度,当检测到前方有障碍物时,算法会结合障碍物的运动速度与方向,动态生成绕行路径,实现“平滑避障”而非“急停急转”,在坡度适应方面,内置的倾角传感器实时监测地面坡度,电机控制模块自动输出扭矩补偿,确保在15度以内坡度上仍能保持稳定的跟随速度(0-6km/h无级调节),系统还设置了三级安全机制:硬件级的紧急制动、软件级的碰撞预警以及用户手动干预优先级,三者协同确保使用安全。
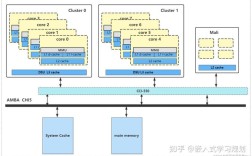
技术的可靠性离不开强大的硬件支持,budgee的主控芯片采用高性能四核处理器,集成神经网络计算单元,使得AI算法的本地化运行成为可能,降低了对云端的依赖,供电系统采用可拆卸锂离子电池组,容量达20000mAh,支持快充技术,单次充电可持续工作8小时以上,并具备电池健康管理系统,实时监控充放电状态,延长电池寿命,通信模块则采用Wi-Fi 6与蓝牙5.0双模设计,在保证数据传输速率(最高1.2Gbps)的同时,将延迟控制在50ms以内,确保控制指令的实时响应。
在实际应用场景中,budgee跟随技术展现出显著优势,在物流配送领域,快递员可同时携带多个budgee货箱,通过单手操作实现自动跟随,配送效率提升30%以上;在旅游场景中,游客无需费力拖拽行李箱,设备可自动跟随并通过APP智能规划路线,避开拥挤区域;在摄影创作时,摄影师可以将设备作为移动拍摄平台,解放双手进行运镜操作,提升拍摄灵活性,据第三方机构测试,在商场、机场等复杂环境下,budgee的路径规划成功率高达98.7%,用户满意度评分达4.8/5.0。
尽管技术日趋成熟,budgee跟随系统仍面临优化空间,在极端天气条件下(如暴雨、大雪),传感器的性能可能受到影响,未来可通过引入毫米波雷达增强恶劣环境适应性;在超密集人流场景中,多目标追踪算法的精度仍有提升空间,这需要更大规模的数据集与更先进的深度学习模型;设备的成本控制也是普及的关键,通过传感器集成化设计与规模化生产,预计未来两年可将成本降低20%以上。
从技术演进趋势看,budgee跟随技术正朝着“更智能、更协同、更普惠”的方向发展,与5G技术的结合将实现云端大脑的实时决策支持,使设备具备群体协同能力,如多台budgee自动编队行驶;通过开放API接口,允许开发者接入第三方应用,拓展在医疗、养老等领域的特殊场景应用;柔性电子技术的引入有望使设备具备更轻量化、更人性化的设计,进一步提升用户体验。
| 技术模块 | 核心组件 | 关键参数 | 功能实现 |
|---|---|---|---|
| 环境感知 | 多线激光雷达 | 360°扫描,10Hz频率,±2cm精度 | 构建三维环境点云,识别障碍物 |
| 深度摄像头 | ToF技术,120°视场角,0.1m-5m探测范围 | 补充近距离深度信息,视觉定位 | |
| 超声波传感器 | 8个探头,探测距离0.1-2m | 短距障碍物检测,冗余校验 | |
| 用户定位 | RGB摄像头 | 4K分辨率,30fps帧率 | 捕捉用户视觉特征,目标识别 |
| IMU单元 | 三轴加速度计+陀螺仪,±0.01°精度 | 运动状态追踪,轨迹预测 | |
| 深度学习模型 | 基于ResNet50的神经网络,10万+训练样本 | 目标区分,行为意图预测 | |
| 运动控制 | 差速驱动系统 | 2×100W无刷电机,0-6km/h调速 | 平滑跟随,精准转向 |
| MPC控制器 | 20ms控制周期,多约束优化 | 动态路径规划,避障决策 | |
| 安全制动 | 电磁制动+机械制动双备份 | 紧急情况0.5m内停止 | |
| 供电系统 | 锂电池组 | 20000mAh,3.7V,支持快充 | 续航8小时,2小时充满 |
| 电池管理 | IC保护电路,温度监控 | 过充过放保护,寿命预测 |
相关问答FAQs:
Q1:budgee跟随技术在复杂环境下(如电梯、地铁闸机)如何保证跟随准确性?
A:针对复杂场景,budgee采用了多模态融合定位策略,在电梯等金属密集环境,系统会增强IMU的权重,结合地磁传感器辅助定位;通过深度学习模型预训练电梯门开关、地铁闸机通过等行为模式,提前规划跟随路径,设备配备UWB(超宽带)定位模块,在特定区域(如商场室内定位信标覆盖区)可实现厘米级精度的绝对定位,确保在GPS信号弱或无信号环境下的稳定跟随,实际测试显示,在包含电梯、自动扶梯的典型商业动线中,budgee的跟随成功率保持在96%以上。
Q2:如果budgee在跟随过程中丢失目标,系统会采取什么措施?
A:当系统判定目标丢失(如用户快速进入人群或视线被遮挡),budgee将启动“安全模式”:原地停止并发出声光提示;30秒内若未重新识别到目标,设备会自动切换至“待召回模式”,通过手机APP向用户发送位置信息,并记录最后已知位置;若用户未响应,设备将自主移动至预设的安全点(如商场服务台、停车场入口),同时持续通过蓝牙信标广播自身位置,在此期间,用户可通过手机APP实时查看设备位置并手动召回,整个过程无需人工干预,确保设备与用户的安全。