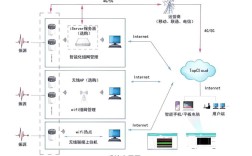
SLAM技术作为同时定位与地图构建的核心技术,通过传感器融合与算法优化,实现了设备在未知环境中的自主导航与地图生成,其应用场景已从机器人领域扩展至自动驾驶、AR/VR、智慧城市等多个行业,成为推动智能化升级的关键技术,以下从具体领域展开分析SLAM技术的应用实践。

在工业自动化领域,SLAM技术为移动机器人和自动化设备提供了环境感知能力,在智能制造车间,AGV(自动导引运输车)搭载激光雷达或视觉传感器,通过SLAM算法实时构建车间三维地图,并动态规划最优路径,避免与障碍物碰撞,汽车工厂中的SLAM-AGV可精准识别物料架位置,实现零部件的无人化转运,较传统磁导航路径规划效率提升30%以上,在仓储物流中,SLAM驱动的分拣机器人能通过视觉SLAM识别货架编码,在0.5米误差内完成货品抓取,配合WMS系统实现库存实时更新,电力巡检机器人利用SLAM技术在变电站复杂环境中自主导航,通过红外传感器与地图匹配,识别设备温度异常,将人工巡检效率提升5倍。
消费级电子领域是SLAM技术普及最快的场景之一,智能手机中的AR应用依赖视觉SLAM实现虚拟物体与真实环境的精准叠加,苹果ARKit通过摄像头与IMU惯性测量单元融合,构建厘米级精度的环境地图,支持《Pokémon GO》等游戏中虚拟角色的实时定位与交互,扫地机器人则通过激光SLAM(如LDS激光雷达)与视觉SLAM(如dToF飞行时间传感器)结合,在家庭环境中构建拓扑地图,实现弓字形清扫与禁区避障,新一代扫地机器人进一步引入VSLAM(视觉SLAM)算法,通过识别家居纹理特征,在弱光环境下仍保持90%以上的清扫覆盖率。
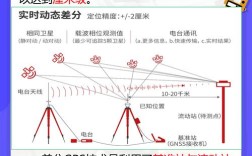
在自动驾驶与智慧交通领域,SLAM技术为车辆提供了环境认知的基础能力,L4级自动驾驶汽车通过多线激光雷达、摄像头与GNSS(全球导航卫星系统)的SLAM融合定位,在隧道、城市峡谷等GPS信号丢失区域,仍能以10cm级精度构建实时地图,Waymo自动驾驶车辆在旧金山城区测试中,利用SLAM技术动态识别临时路障与行人轨迹,决策响应时间缩短至0.3秒,智慧公交系统则通过SLAM实现站点精准停靠,结合轮速编码器与RTK-GPS,在复杂路况下定位误差控制在20cm内,提升了乘客上下车安全性。
AR/VR与数字孪生领域对SLAM技术的精度与实时性提出更高要求,在工业AR运维中,工程人员通过HoloLens等设备,SLAM技术将设备三维模型与物理工厂对齐,实现维修指令的精准投射,西门子数字工厂利用SLAM构建车间数字孪生体,通过实时传感器数据更新虚拟模型,将设备故障排查时间从4小时缩短至40分钟,文旅AR应用中,故宫博物院通过SLAM技术定位游客位置,在手机端叠加历史场景复原动画,实现“穿越式”游览,游客停留时间平均延长25分钟。

智慧城市与基础设施领域,SLAM技术助力城市管理的精细化,在地下管廊巡检中,搭载SLAM轮式机器人在复杂管网环境中自主导航,通过气体传感器与地图匹配,识别燃气泄漏点,巡检效率提升3倍,城市测绘领域,无人机SLAM系统通过激光雷达与视觉融合,在1小时内完成0.5平方公里区域的三建模建模,较传统人工测绘效率提升20倍,SLAM技术应用于智慧安防,通过摄像头实时构建校园、社区的三维地图,动态识别异常入侵行为,报警响应时间缩短至10秒。
以下为SLAM技术在不同场景的核心应用对比:
| 应用领域 | 典型设备/系统 | 传感器组合 | 核心价值指标 |
|---|---|---|---|
| 工业自动化 | AGV、巡检机器人 | 激光雷达+IMU+视觉 | 路径规划效率提升30% |
| 消费电子 | 扫地机器人、手机 | dToF+VSLAM+陀螺仪 | 清扫覆盖率>90% |
| 自动驾驶 | L4级自动驾驶汽车 | 多线激光雷达+摄像头+GNSS | 定位误差<10cm |
| AR/VR | HoloLens、AR眼镜 | 视觉SLAM+深度传感器 | 模型对齐误差<5mm |
| 智慧城市 | 无人机、巡检机器人 | 激光雷达+RTK-GPS | 测绘效率提升20倍 |
相关问答FAQs:
Q1:SLAM技术在GPS信号丢失的环境中如何实现精准定位?
A1:SLAM技术通过多传感器融合解决GPS信号缺失问题,以自动驾驶为例,车辆搭载的激光雷达实时扫描周围环境,构建点云地图;IMU(惯性测量单元)记录加速度与角速度数据,通过卡尔曼滤波算法预测位姿变化,当GPS失效时,系统通过迭代最近点(ICP)算法将当前点云与预先构建的局部地图匹配,实现厘米级定位,视觉SLAM通过ORB-SLAM等算法,利用摄像头拍摄的图像特征点进行回环检测,消除累积误差,确保长时间导航的稳定性。

Q2:SLAM技术在复杂动态环境中如何处理障碍物与移动物体?
A2:动态环境中的SLAM技术主要通过动态物体检测与地图更新机制实现,以激光SLAM为例,系统通过背景差分算法识别点云数据中的动态障碍物(如行人、车辆),将其从静态地图中剔除;采用概率 occupancy map(占据栅格地图)实时更新可通行区域,视觉SLAM则通过光流法追踪移动物体轨迹,使用YOLO等目标检测算法识别动态物体类别,通过动态权重调整算法降低其对地图构建的干扰,在商场场景中,SLAM系统可过滤80%以上的动态行人干扰,保持地图构建精度在±15cm以内。